AEZITH
クレーン玉掛けを題材とした遠隔操縦デモシステムの開発

工場内の遠隔操縦を想定し、Kinect×4台とHTC Viveによる3Dリアルタイム再構成、自製6DoFロボットアームを組み合わせたデモを2016年に開発。展示会で来場者体験型デモを実施し、大きな反響を得ました。
- 遠隔操縦
- 3Dリアルタイム再構成
- Kinect
- HTC Vive
- ロボットアーム
- テレイグジスタンス
プロジェクト概要
当時、工場内で遠隔操縦により機器を操作する事例はほとんどありませんでした。人と機器が密接に連携して作業するシーンを想定し、クレーンによる玉掛け作業を題材に遠隔操縦デモシステムを開発しました。2016年9月から12月の約4ヶ月で構築し、展示会で来場者に体験いただきました。
背景とコンセプト
玉掛け作業は、作業者がフックを荷に掛けたり外したりしながら、様々な方向から荷の状態を確認しながら行う作業です。これを遠隔操縦するには、遠隔地にいる操作者が荷を多方向から視認できる必要がありました。
その実現には、3Dリアルタイム再構成と呼ばれる技術が必要でした。本システムではこの課題に取り組み、来場者が実際に操作できるデモ展示として仕上げました。
システム構成
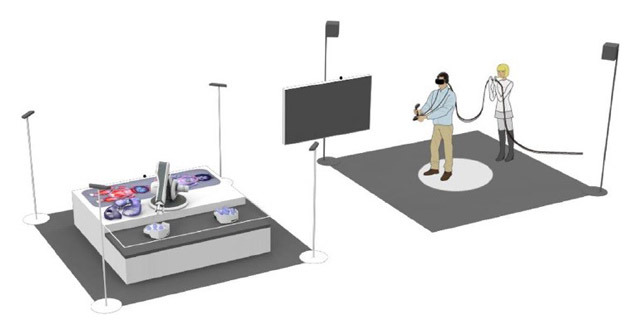
遠隔操作者が荷を立体的に把握できるよう、以下の構成を採用しました。
Microsoft Kinect を4台配置し、荷に関わる対象を多方向から撮影
HTC Vive を利用し、HMD上で3Dリアルタイム再構成を表示。荷を360度・多方向から視認可能にした
クレーン導入は大掛かりになるため、6DoFのロボットアームを自製し、小型で持ち運び可能な構成とした
固定荷物の掴みだけでは簡易すぎるため、小型の自律移動車に対象物を載せ、ロボットアームで掴むシナリオを追加した
開発と展示
2016年9月から12月まで開発を行い、展示会でデモ展示を実施しました。来場者に実際に操作いただく形式とし、多くの方に体験していただくことで大きな反響を得ました。
※ クライアント名・詳細仕様の一部は非公開としています。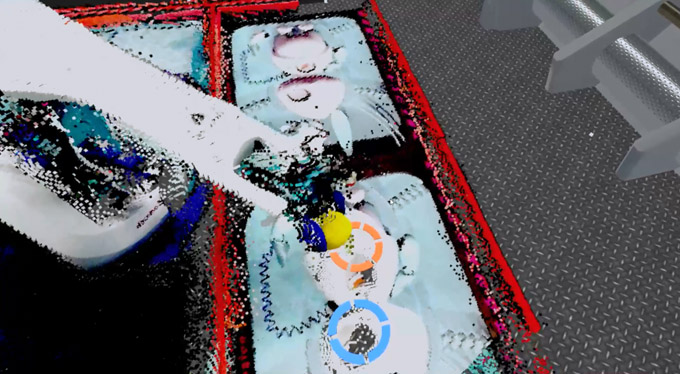 参考)https://www.nssol.nipponsteel.com/future/stories/5g-factory.html
参考)https://www.nssol.nipponsteel.com/future/stories/5g-factory.html