AEZITH
実績
フィジカルAIやロボット開発に関する公開可能なこれまでの開発実績を掲載します。
2019–2020
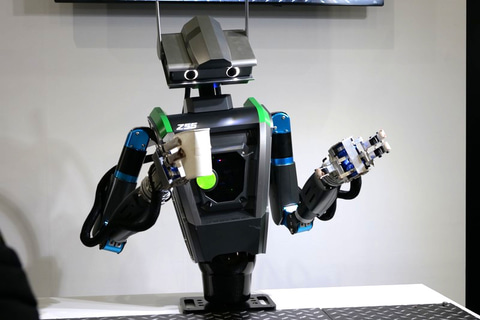
ヒューマノイド遠隔操作への力フィードバックシステム開発
工場作業の遠隔操作検証で力の非フィードバックが障壁であると判明し、バイラテラル制御・インピーダンス制御による力フィードバックを追加。2019年6月〜約6ヶ月の開発のち、2020年1月の展示会で新システムを公開しました。
- テレイグジスタンス
- ヒューマノイド
- 遠隔操作

2017
ヒューマノイドロボット遠隔操作システムの開発
某通信事業者向けに、モーションキャプチャ・データグローブ・立体視・触覚フィードバックを備えたヒューマノイド遠隔操作システムを約4ヶ月で開発。2017年12月の展示会で「幽体離脱体験」として好評を得ました。
- テレイグジスタンス
- ヒューマノイド
- 遠隔操作

2016
クレーン玉掛けを題材とした遠隔操縦デモシステムの開発
工場内の遠隔操縦を想定し、Kinect×4台とHTC Viveによる3Dリアルタイム再構成、自製6DoFロボットアームを組み合わせたデモを2016年に開発。展示会で来場者体験型デモを実施し、大きな反響を得ました。
- 遠隔操縦
- 3Dリアルタイム再構成
- Kinect