AEZITH
ヒューマノイド遠隔操作への力フィードバックシステム開発
工場作業の遠隔操作検証で力の非フィードバックが障壁であると判明し、バイラテラル制御・インピーダンス制御による力フィードバックを追加。2019年6月〜約6ヶ月の開発のち、2020年1月の展示会で新システムを公開しました。
- テレイグジスタンス
- ヒューマノイド
- 遠隔操作
- 力フィードバック
- バイラテラル制御
- インピーダンス制御
プロジェクト概要
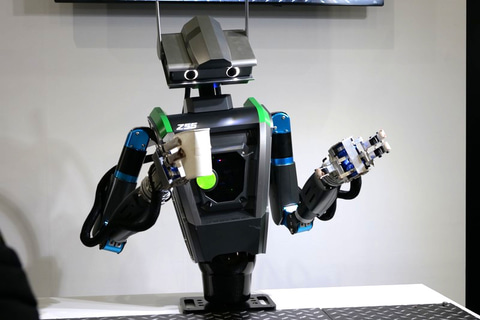
ヒューマノイドロボットの遠隔操作において、操作者へ力の感覚を伝えるフィードバックシステムを追加開発しました。2019年6月から約6ヶ月の開発期間を経て、2020年1月の展示会にて、力フィードバック制御を加えたヒューマノイド遠隔操作システムを展示しました。
背景 — 遠隔操作の限界と課題の発見
これまでに構築してきたシステムでは、人とヒューマノイドロボットの動作をリアルタイムで同期させることはできていました。しかし、実際の工場作業を遠隔操作として検証してみると、9割以上の作業が遂行できないという結果となりました。
その主な原因は、ヒューマノイドの手にかかる力が人間側にフィードバックされていないことにありました。操作者はロボットの手先に生じている力を感じ取れないため、両手を使った協調作業の調整がうまくいかないのです。
課題の具体例 — ダンボールを抱える動作
40cm四方のダンボールを抱える動作で、その問題が顕著に現れました。ヒューマノイドにこの動作をさせること自体は、一瞬であれば可能です。ところが操作者側にはダンボールが存在しないため、両腕の開きが数cm単位で微妙に変化してしまいます。
一方、ヒューマノイド側にはダンボールが実際にあるため、人間の手のわずかなゆらぎが、ロボットの手先では大きな力としてダンボールに伝わります。その結果、ダンボールが破損するか、ヒューマノイドロボットのハンドが破損するかのいずれかに至るケースが繰り返されました。
この経験から、ヒューマノイドロボットの手にかかる力を人間にフィードバックすることが、実用的な遠隔操作には不可欠であると認識しました。
システム構成 — 力フィードバックの実現方式
新たなヒューマノイドロボット遠隔操作システムの開発依頼を受け、今回はヒューマノイドから人間への力フィードバック機能を中心に追加開発を進めました。力の伝達には、用途に応じて次の2方式を組み合わせています。
バイラテラル制御 — ロボットハンドが物体を持つときに感じる力、すなわち硬さや柔らかさを、操作者にフィードバックする
インピーダンス制御 — ロボットハンドで物体を掴んだ際にアームが受ける重量感を、操作者にフィードバックする
これにより、操作者は遠隔地のロボット手先の状態を力の感覚として把握し、両手操作を含む協調動作を調整しやすくなります。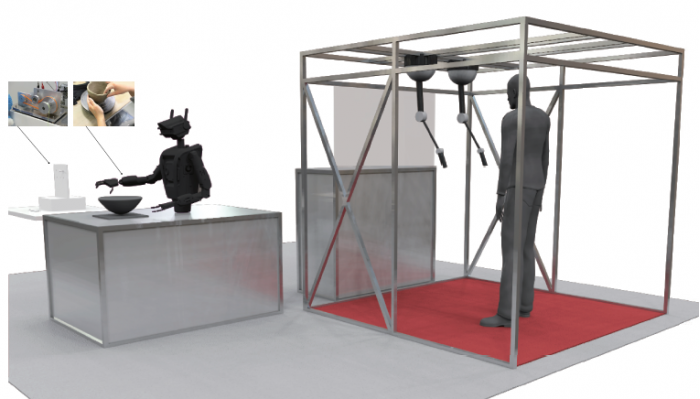
開発と展示
2019年6月に開発を開始し、約6ヶ月の期間で力フィードバック制御を統合した遠隔操作システムを構築しました。2020年1月の展示会において、新システムを来場者にご覧いただき、力フィードバックが遠隔操作の実用性に与える効果を実証しました。
※ クライアント名・詳細仕様の一部は非公開としています。
参考)https://k-tai.watch.impress.co.jp/docs/news/1230815.html